幂法和 Jacobi 算法
1 问题简介
1.1 符号约定
在本笔记中,除非另有说明,否则将使用以下符号约定:
- 矩阵与向量:大写字母 \(A, B, \ldots\) 表示矩阵;小写字母 \(x, y, u, \ldots\) 表示列向量。
- 元素表示:\(a_{ij}\) 表示矩阵 \(A\) 的第 \(i\) 行第 \(j\) 列的元素;\(x_j\) 表示向量 \(x\) 的第 \(j\) 个分量。
- 转置与逆:\(A^T\) 表示矩阵 \(A\) 的转置;\(A^{-1}\) 表示矩阵 \(A\) 的逆。
- 范数:\(\|\cdot\|_2\) 表示向量的 2-范数或矩阵的谱范数;\(\|\cdot\|_F\) 表示矩阵的 Frobenius 范数。
- 对角化:\(\operatorname{diag}(a_1, \ldots, a_n)\) 表示以 \(a_1, \ldots, a_n\) 为对角线元素的对角矩阵。
- 收敛性:\(S(A) = \sum_{i \neq j} a_{ij}^2\) 表示矩阵 \(A\) 的所有非对角线元素的平方和。
1.2 特征值问题的背景
特征值问题在工程和物理中有广泛应用。以弹簧-质点系统的共振问题为例:
\[
M \ddot{y} + Ky = 0
\]
假设系统以自然频率 \(\omega\) 做谐波振动,即 \(y_j(t) = x_j \exp(i \omega t)\),代入后得到特征值问题:
\[
Kx = \omega^2 M x \quad \Rightarrow \quad Ax = \lambda x
\]
其中 \(\lambda = \omega^2\)。求解系统的自然频率等价于求解矩阵的 特征值。
1.2 基本概念
定义 1.1(特征多项式与特征值)
设矩阵 \(A \in \mathbb{R}^{n \times n}\),称
\[
\varphi(\lambda) = \det(\lambda I - A) = \lambda^n + c_1 \lambda^{n-1} + \cdots + c_{n-1}\lambda + c_n
\]
为 \(A\) 的 特征多项式;\(n\) 次代数方程 \(\varphi(\lambda) = 0\) 为 \(A\) 的 特征方程,其 \(n\) 个根 \(\lambda_1, \lambda_2, \ldots, \lambda_n\) 被称为 \(A\) 的 特征值。
定义 1.2(特征向量与特征子空间)
对于矩阵 \(A\) 的一个特征值 \(\lambda\),对应的齐次线性方程组
\[
(\lambda I - A)x = 0
\]
有非零解,其解向量 \(x\) 称为矩阵 \(A\) 对应于 \(\lambda\) 的 特征向量。同一个特征值对应的特征向量构成线性子空间,称为 特征子空间(eigenspace)。
1.3 特征值的基本性质
定理 1.1(特征值的基本关系)
设 \(\lambda_i\),\(i = 1, 2, \ldots, n\) 为 \(A \in \mathbb{R}^{n \times n}\) 的特征值,则:
\[
\sum_{j=1}^{n} \lambda_j = \sum_{j=1}^{n} a_{jj} = \operatorname{tr}(A)
\]
\[
\prod_{j=1}^{n} \lambda_j = \det(A)
\]
这里 \(\operatorname{tr}(A)\) 表示矩阵对角线元素之和,称为矩阵的 迹(trace)。
定理 1.2(相似变换不改变特征值)
矩阵的相似变换不改变特征值。设矩阵 \(A\) 与 \(B\) 为相似矩阵,即存在非奇异矩阵 \(X\) 使得 \(B = X^{-1}AX\),则:
- 矩阵 \(A\) 和 \(B\) 的特征值相同,即 \(\lambda(A) = \lambda(B)\)
- 若 \(y\) 是 \(B\) 的特征向量,则 \(Xy\) 为 \(A\) 的特征向量
定理 1.3(矩阵运算的特征值)
设 \(\lambda_i\),\(i = 1, 2, \ldots, n\) 为矩阵 \(A\) 的特征值,则:
- 矩阵 \(cA\)(\(c\) 为常数)的特征值为 \(c\lambda_i\)
- 矩阵 \(A + cI\)(\(c\) 为常数)的特征值为 \(\lambda_i + c\)
- 矩阵 \(A^k\)(\(k\) 为正整数)的特征值为 \(\lambda_i^k\)
- 若 \(p(x)\) 为多项式函数,则矩阵 \(p(A)\) 的特征值为 \(p(\lambda_i)\)
- 若 \(A\) 非奇异,则 \(A^{-1}\) 的特征值为 \(\lambda_i^{-1}\)
定理 1.4(分块三角矩阵的特征值)
如果矩阵 \(A\) 是 分块对角矩阵,或者 分块上(下)三角矩阵,例如分块上三角矩阵可以写成:
\[
A = \begin{bmatrix}
A_{11} & A_{12} & \cdots & A_{1m} \\
& A_{22} & \cdots & A_{2m} \\
& & \ddots & \vdots \\
& & & A_{mm}
\end{bmatrix}
\]
其中 \(A_{ii} \in \mathbb{R}^{n_i \times n_i}\)(\(i = 1, 2, \ldots, m\))为方阵,且 \(\sum_{i=1}^m n_i = n\),则矩阵 \(A\) 的特征值为各对角块特征值的并集:
\[
\lambda(A) = \bigcup_{j=1}^{m} \lambda(A_{jj})
\]
重要推论
对于 上三角矩阵 或 下三角矩阵,其特征值就是 对角线元素。
1.4 代数重数与几何重数
定义 1.3(代数重数与几何重数)
设矩阵 \(A \in \mathbb{R}^{n \times n}\) 有 \(m\) 个(\(m \leq n\))不同的特征值 \(\tilde{\lambda}_1, \tilde{\lambda}_2, \ldots, \tilde{\lambda}_m\)。若 \(\tilde{\lambda}_j\) 是特征方程的 \(n_j\) 重根,则称 \(n_j\) 为 \(\tilde{\lambda}_j\) 的 代数重数(algebraic multiplicity),并称 \(\tilde{\lambda}_j\) 对应的特征子空间的维数 \(k_j\) 为 \(\tilde{\lambda}_j\) 的 几何重数(geometric multiplicity)。
重要性质
几何重数满足 \(1 \leq k_j \leq n_j\),即几何重数不超过代数重数。
证明
设 \(\lambda_j\) 是矩阵 \(A\) 的特征值,代数重数为 \(n_j\),几何重数为 \(k_j\)。
由几何重数的定义,\(k_j\) 是对应于 \(\lambda_j\) 的特征子空间的维数,即齐次线性方程组 \((\lambda_j I - A)x = 0\) 的解空间维数:
\[
k_j = \dim(\ker(\lambda_j I - A)) = n - \operatorname{rank}(\lambda_j I - A)
\]
下面证明 \(k_j \leq n_j\)。
取特征子空间的一组基 \(v_1, v_2, \ldots, v_{k_j}\),将其扩充为 \(\mathbb{R}^n\) 的一组基:
\[
v_1, v_2, \ldots, v_{k_j}, w_{k_j+1}, \ldots, w_n
\]
令 \(P = [v_1, \ldots, v_{k_j}, w_{k_j+1}, \ldots, w_n]\),则 \(P\) 可逆。考察相似变换 \(P^{-1}AP\):
对于 \(i = 1, \ldots, k_j\),有 \(Av_i = \lambda_j v_i\),因此 \(P^{-1}AP\) 的前 \(k_j\) 列为:
\[
P^{-1}Av_i = P^{-1}(\lambda_j v_i) = \lambda_j e_i
\]
其中 \(e_i\) 是标准基向量。这说明 \(P^{-1}AP\) 具有如下分块形式:
\[
P^{-1}AP = \begin{bmatrix} \lambda_j I_{k_j} & B \\ 0 & C \end{bmatrix}
\]
计算特征多项式:
\[
\det(\lambda I - A) = \det(\lambda I - P^{-1}AP) = \det\begin{bmatrix} (\lambda - \lambda_j)I_{k_j} & -B \\ 0 & \lambda I - C \end{bmatrix}
\]
\[
= (\lambda - \lambda_j)^{k_j} \det(\lambda I - C)
\]
这表明 \((\lambda - \lambda_j)^{k_j}\) 整除 \(\det(\lambda I - A)\)。由于 \(\lambda_j\) 的代数重数为 \(n_j\),即 \((\lambda - \lambda_j)^{n_j}\) 是特征多项式中 \((\lambda - \lambda_j)\) 的最高幂次,因此:
\[
k_j \leq n_j
\]
另外,由于 \(\lambda_j\) 至少对应一个非零特征向量,故 \(k_j \geq 1\)。
综上,\(1 \leq k_j \leq n_j\)。\(\square\)
2 幂法
2.1 主特征值与主特征向量
定义 2.1(主特征值)
在矩阵 \(A\) 的特征值中,模最大的特征值称为 主特征值(dominant eigenvalue),对应的特征向量称为 主特征向量。
幂法是一种计算矩阵 主特征值 以及对应特征向量的迭代方法。
注意
在复数域内,主特征值可能不唯一。如果矩阵 \(A\) 有唯一的主特征值,则幂法可以方便地计算出这个主特征值以及相应的特征向量。并且,如果 \(A \in \mathbb{R}^{n \times n}\) 并且有唯一的主特征值,则这个主特征值为实数。
2.2 幂法的基本原理
对于 \(A \in \mathbb{R}^{n \times n}\) 并且有唯一的主特征值,考虑 \(A\) 的一组线性无关的单位特征向量 \(u_1, u_2, \ldots, u_n\),则某个非零向量 \(x^{(0)} \in \mathbb{R}^n\) 可以表示成这组特征向量的线性组合:
\[
x^{(0)} = \alpha_1 u_1 + \alpha_2 u_2 + \cdots + \alpha_n u_n
\]
于是:
\[
A^k x^{(0)} = \alpha_1 \lambda_1^k u_1 + \alpha_2 \lambda_2^k u_2 + \cdots + \alpha_n \lambda_n^k u_n
\]
整理得:
\[
A^k x^{(0)} = \lambda_1^k \left( \alpha_1 u_1 + \alpha_2 \left(\frac{\lambda_2}{\lambda_1}\right)^k u_2 + \cdots + \alpha_n \left(\frac{\lambda_n}{\lambda_1}\right)^k u_n \right)
\]
当 \(k \to \infty\) 时,由于 \(|\lambda_i/\lambda_1| < 1\)(\(i \geq 2\)),归一化的 \(x^{(k)}\) 趋近于 \(u_1\)。
定理 2.1(幂法收敛性)
设 \(A \in \mathbb{R}^{n \times n}\) 并且有唯一的主特征值,记为 \(\lambda_1\),随机选择一非零向量 \(x^{(0)} \in \mathbb{R}^n\),并按照迭代公式进行计算:
\[
x^{(k)} = A x^{(k-1)}, \quad k = 1, 2, \ldots
\]
则有:
- 当 \(k \to \infty\) 时,归一化的 \(x^{(k)}\) 趋近于 \(\lambda_1\) 对应的特征向量
- 主特征值 \(\lambda_1\) 通过下式计算:
\[
\lambda_1 = \lim_{k \to \infty} \frac{(x^{(k+1)})_j}{(x^{(k)})_j}
\]
这里 \((x^{(k)})_j\) 表示 \(x^{(k)}\) 的第 \(j\) 个分量,而 \(j\) 是 \(x^{(k+1)}\) 绝对值最大的元素下标。
证明
假设矩阵 \(A\) 具有 \(n\) 个线性无关的特征向量 \(u_1, u_2, \ldots, u_n\),它们对应于特征值 \(\lambda_1, \lambda_2, \ldots, \lambda_n\)。
由于主特征值 \(\lambda_1\) 唯一,我们有:
\[
|\lambda_1| > |\lambda_2| \ge |\lambda_3| \ge \cdots \ge |\lambda_n|
\]
因为特征向量组成了 \(\mathbb{R}^n\) 的一组基,任何初始向量 \(x^{(0)}\) 都可以表示为它们的线性组合:
\[
x^{(0)} = \alpha_1 u_1 + \alpha_2 u_2 + \cdots + \alpha_n u_n
\]
假设我们随机选取的 \(x^{(0)}\) 在主特征向量方向上的投影非零,即 \(\alpha_1 \neq 0\)。根据迭代公式 \(x^{(k)} = A^k x^{(0)}\),有:
\[
x^{(k)} = \alpha_1 \lambda_1^k u_1 + \alpha_2 \lambda_2^k u_2 + \cdots + \alpha_n \lambda_n^k u_n
\]
提取出 \(\lambda_1^k \alpha_1\):
\[
x^{(k)} = \lambda_1^k \alpha_1 \left( u_1 + \frac{\alpha_2}{\alpha_1} \left(\frac{\lambda_2}{\lambda_1}\right)^k u_2 + \cdots + \frac{\alpha_n}{\alpha_1} \left(\frac{\lambda_n}{\lambda_1}\right)^k u_n \right)
\]
同理,对于 \(x^{(k+1)}\):
\[
x^{(k+1)} = \lambda_1^{k+1} \alpha_1 \left( u_1 + \frac{\alpha_2}{\alpha_1} \left(\frac{\lambda_2}{\lambda_1}\right)^{k+1} u_2 + \cdots + \frac{\alpha_n}{\alpha_1} \left(\frac{\lambda_n}{\lambda_1}\right)^{k+1} u_n \right)
\]
因为对于所有的 \(i \ge 2\),都有 \(|\frac{\lambda_i}{\lambda_1}| < 1\),所以当 \(k \to \infty\) 时,\((\frac{\lambda_i}{\lambda_1})^k \to 0\)。
由此可得,在 \(k\) 足够大时:
\[
x^{(k)} \approx \lambda_1^k \alpha_1 u_1
\]
\[
x^{(k+1)} \approx \lambda_1^{k+1} \alpha_1 u_1
\]
这说明,向量 \(x^{(k)}\) 的方向趋近于主特征向量 \(u_1\) 的方向,归一化后即收敛于 \(u_1\)。
对于任意非零分量 \(j\)(为避免除零,通常取绝对值最大的分量),我们考察相邻两次迭代的比值:
\[
\frac{(x^{(k+1)})_j}{(x^{(k)})_j} = \frac{\lambda_1^{k+1} \alpha_1 (u_1)_j + O\left(\lambda_1^{k+1} \left|\frac{\lambda_2}{\lambda_1}\right|^{k+1}\right)}{\lambda_1^k \alpha_1 (u_1)_j + O\left(\lambda_1^k \left|\frac{\lambda_2}{\lambda_1}\right|^k\right)}
\]
提取公因子 \(\lambda_1^k \alpha_1 (u_1)_j\):
\[
\frac{(x^{(k+1)})_j}{(x^{(k)})_j} = \lambda_1 \frac{1 + O\left(\left|\frac{\lambda_2}{\lambda_1}\right|^{k+1}\right)}{1 + O\left(\left|\frac{\lambda_2}{\lambda_1}\right|^k\right)}
\]
当 \(k \to \infty\) 时,误差项趋于 \(0\),因此:
\[
\lim_{k \to \infty} \frac{(x^{(k+1)})_j}{(x^{(k)})_j} = \lambda_1
\]
证明完毕。 \(\square\)
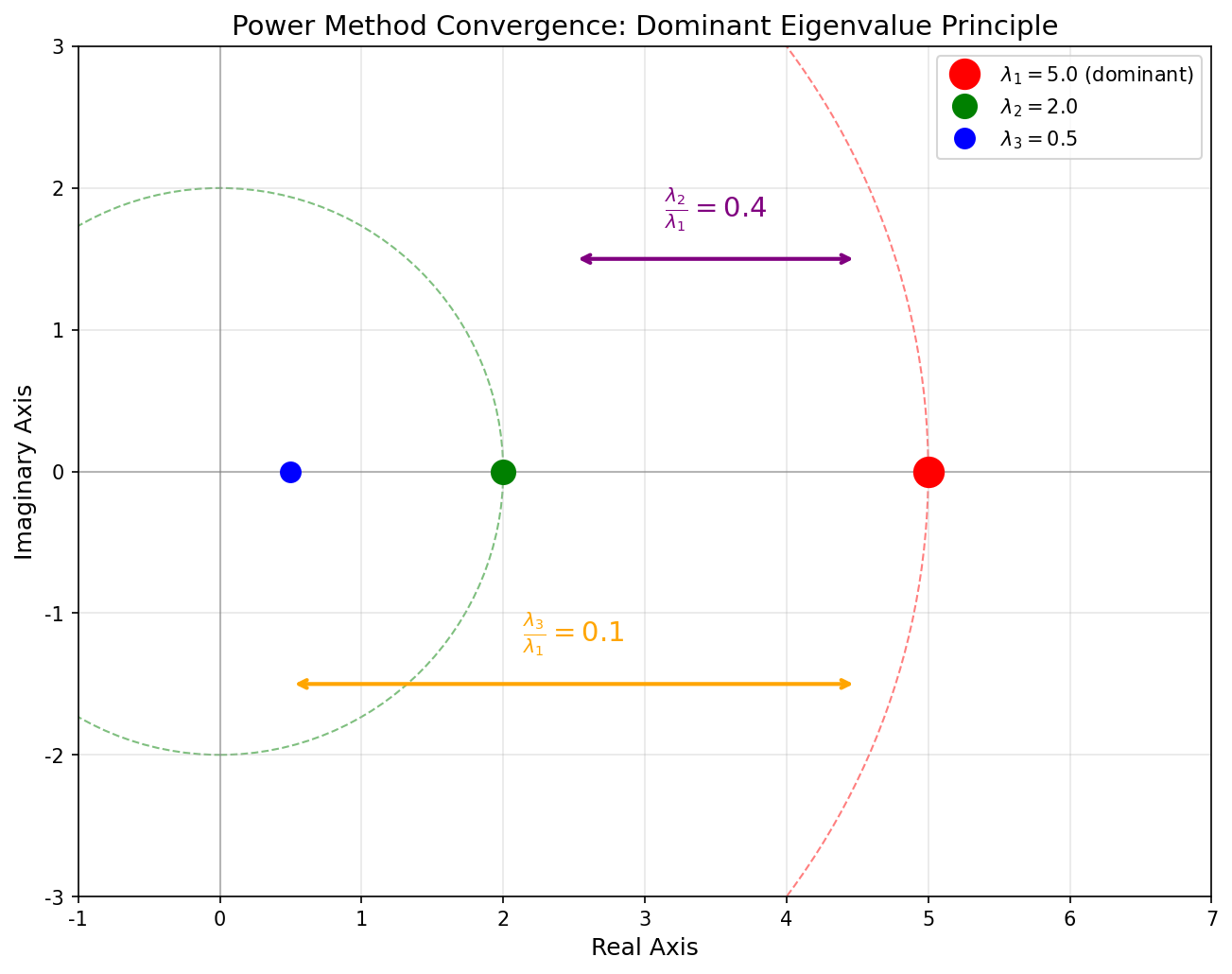
上图中展示了幂法的收敛原理:当 \(|\lambda_2/\lambda_1|\) 越小,收敛速度越快。
2.3 归一化处理
直接迭代 \(x^{(k)} = Ax^{(k-1)}\) 存在问题:
- 当 \(|\lambda_1| > 1\) 时,\(x^{(k)}\) 会因为 \(\lambda_1^k\) 项而上溢出
- 当 \(|\lambda_1| < 1\) 时,会出现数值太小而下溢出
因此,实践中需要对 \(x^{(k)}\) 进行归一化,迭代格式变成:
\[
\begin{cases}
y^{(k)} = \dfrac{x^{(k)}}{\|x^{(k)}\|_\infty} \\[8pt]
x^{(k+1)} = A y^{(k)}
\end{cases}, \quad k = 0, 1, 2, \ldots
\]
最终,\(\lambda_1 \approx \|x^{(k)}\|_\infty\),\(u_1 \approx y^{(k)}\)。
证明
由上一节幂法收敛性可知,当 \(k\) 足够大时,
\[
x^{(k)} = \lambda_1^k \alpha_1 u_1 + O\left(\lambda_1^k \left|\frac{\lambda_2}{\lambda_1}\right|^k\right)
\]
因此存在常数向量误差项 \(\varepsilon^{(k)}\),使得
\[
x^{(k)} = \lambda_1^k \alpha_1 \left(u_1 + \varepsilon^{(k)}\right), \quad \|\varepsilon^{(k)}\|_\infty \to 0
\]
对无穷范数取值:
\[
\|x^{(k)}\|_\infty
= |\lambda_1|^k |\alpha_1| \, \|u_1 + \varepsilon^{(k)}\|_\infty
\]
所以归一化向量满足
\[
y^{(k)}
= \frac{x^{(k)}}{\|x^{(k)}\|_\infty}
= \operatorname{sgn}(\lambda_1^k \alpha_1)\,
\frac{u_1 + \varepsilon^{(k)}}{\|u_1 + \varepsilon^{(k)}\|_\infty}
\]
当 \(k \to \infty\) 时,由 \(\varepsilon^{(k)} \to 0\) 得
\[
y^{(k)} \to \pm \frac{u_1}{\|u_1\|_\infty}
\]
即归一化后的迭代向量与主特征向量同向(差一个符号因子),故可记作 \(u_1 \approx y^{(k)}\)。
另一方面,归一化迭代满足
\[
x^{(k+1)} = A y^{(k)}
\]
当 \(k\) 足够大时,\(y^{(k)} \approx \pm \dfrac{u_1}{\|u_1\|_\infty}\),从而
\[
x^{(k+1)} \approx \pm \frac{A u_1}{\|u_1\|_\infty}
= \pm \frac{\lambda_1 u_1}{\|u_1\|_\infty}
\]
取无穷范数即得
\[
\|x^{(k+1)}\|_\infty \approx |\lambda_1|
\]
若主特征值为正(或用带符号分量比值估计),可写成
\[
\lambda_1 \approx \|x^{(k+1)}\|_\infty
\]
这说明归一化处理既避免了上溢出/下溢出,又保留了幂法对主特征对 \((\lambda_1,u_1)\) 的收敛性。 \(\square\)
2.4 算法流程
算法 2.1(幂法)
\[
\begin{aligned}
& \textbf{算法: } \text{Power Method} \\
& \textbf{输入: } A \in \mathbb{R}^{n \times n}, \quad x^{(0)} \in \mathbb{R}^n, \quad N, \quad \varepsilon \\
& \textbf{输出: } \lambda_1 \text{ (主特征值)}, \quad u_1 \text{ (主特征向量)} \\
& 1. \quad k \leftarrow 0 \\
& 2. \quad \mu \leftarrow 0 \\
& 3. \quad \textbf{while } k < N \textbf{ do} \\
& 4. \quad \quad i \leftarrow \arg\max_j |x_j| \quad \text{// 最大分量位置} \\
& 5. \quad \quad \lambda_1 \leftarrow x_i \quad \text{// 当前特征值估计} \\
& 6. \quad \quad y \leftarrow x / \lambda_1 \quad \text{// 归一化} \\
& 7. \quad \quad x \leftarrow A y \quad \text{// 矩阵向量乘法} \\
& 8. \quad \quad \textbf{if } |\mu - \lambda_1| < \varepsilon \textbf{ then} \\
& 9. \quad \quad \quad \textbf{return } \lambda_1, y \\
& 10. \quad \quad \textbf{end if} \\
& 11. \quad \quad k \leftarrow k + 1 \\
& 12. \quad \quad \mu \leftarrow \lambda_1 \\
& 13. \quad \textbf{end while} \\
& 14. \quad \textbf{return } \lambda_1, y
\end{aligned}
\]
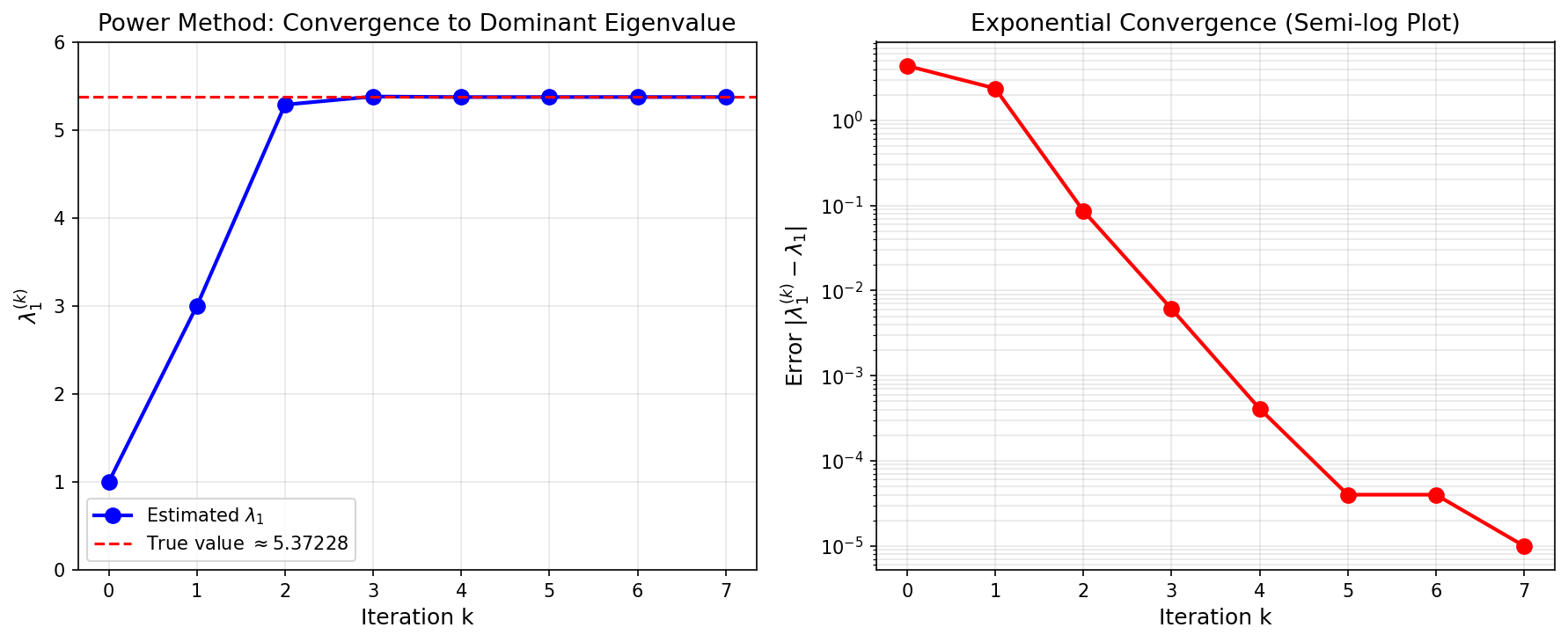
上图展示了幂法求解矩阵 \(A = \begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix}\) 主特征值的收敛过程。可以看到,仅需约 7 次迭代,特征值估计就收敛到真值 \(5.37228\)。
3 幂法的加速
3.1 收敛速度分析
幂法的收敛速率依赖于 次大特征值的模与最大特征值的模之比。当这个比值较小的时候,只需要几次迭代就可以获得很好的最大特征值的近似。
收敛速度
设 \(r = |\lambda_2/\lambda_1|\),则误差大致按 \(r^k\) 衰减。\(r\) 越接近 1,收敛越慢。
3.2 原点位移法
幂法的加速来源于特征值的性质:设 \(\lambda_i\),\(i = 1, 2, \ldots, n\) 为矩阵 \(A\) 的特征值,则矩阵 \(A + cI\)(\(c\) 为常数)的特征值为 \(\lambda_i + c\),并且特征向量不变:
\[
Au_i = \lambda_i u_i \quad \Rightarrow \quad (A + cI)u_i = (\lambda_i + c)u_i
\]
因此,可以尝试用 \(A - \lambda_0 I\) 来代替 \(A\) 进行迭代,其中 \(\lambda_0\) 是一个已知的常数,使得次大特征值的模与最大特征值的模之比变小,从而加速迭代收敛过程。这种加速方法称为 原点位移法(origin shift)。
定理 3.1(最优位移选择)
对于对称正定矩阵,最优位移参数为:
\[
\lambda_0 = \frac{1}{2}(\lambda_2 + \lambda_n)
\]
但实践中,特征值 \(\lambda_2\) 或者 \(\lambda_n\) 事先并不知道,需要对矩阵的特征值分布进行估计。
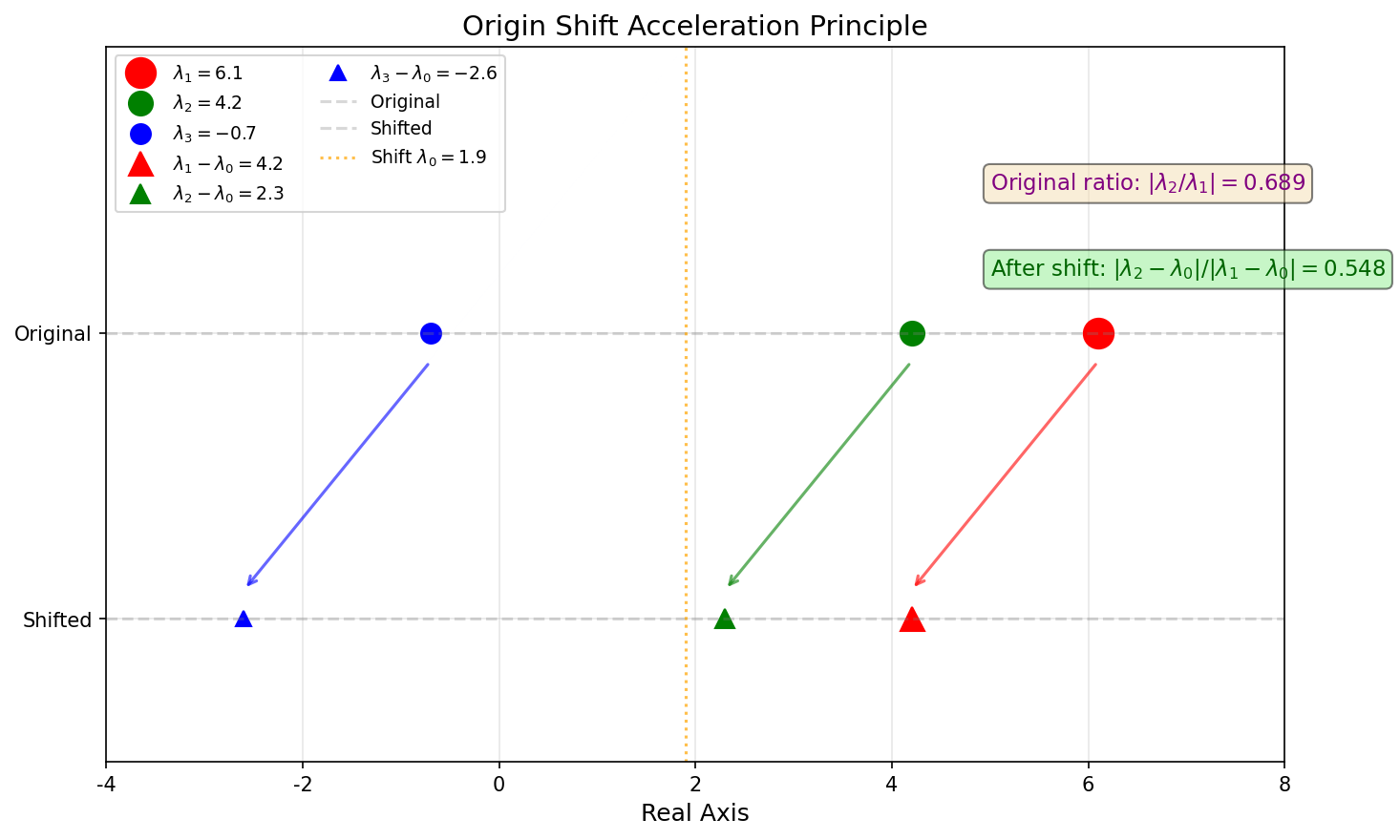
上图中,原点位移后,收敛比从 \(|4.2/6.1| \approx 0.69\) 改善到 \(|2.3/4.2| \approx 0.55\),加速了收敛。
3.3 带位移的幂法算法
算法 3.1(带原点位移的幂法)
\[
\begin{aligned}
& \textbf{算法: } \text{Shifted Power Method} \\
& \textbf{输入: } A \in \mathbb{R}^{n \times n}, \quad x^{(0)} \in \mathbb{R}^n, \quad \lambda_0, \quad N, \quad \varepsilon \\
& \textbf{输出: } \lambda_1 \text{ (主特征值)}, \quad u_1 \text{ (主特征向量)} \\
& 1. \quad k \leftarrow 0 \\
& 2. \quad \mu \leftarrow 0 \\
& 3. \quad \textbf{while } k < N \textbf{ do} \\
& 4. \quad \quad i \leftarrow \arg\max_j |x_j| \\
& 5. \quad \quad \lambda_1 \leftarrow x_i \\
& 6. \quad \quad y \leftarrow x / \lambda_1 \\
& 7. \quad \quad x \leftarrow A y - \lambda_0 y \quad \text{// 使用 } A - \lambda_0 I \\
& 8. \quad \quad \textbf{if } |\mu - \lambda_1| < \varepsilon \textbf{ then} \\
& 9. \quad \quad \quad \textbf{return } \lambda_1 + \lambda_0, y \\
& 10. \quad \quad \textbf{end if} \\
& 11. \quad \quad k \leftarrow k + 1 \\
& 12. \quad \quad \mu \leftarrow \lambda_1 \\
& 13. \quad \textbf{end while} \\
& 14. \quad \lambda_1 \leftarrow \lambda_1 + \lambda_0 \\
& 15. \quad \textbf{return } \lambda_1, y
\end{aligned}
\]
4 幂法的降阶
4.1 降阶方法原理
在得到特征值 \(\lambda_1\) 以及对应的特征向量 \(u_1\) 后,如果需要继续计算 \(\lambda_2\) 及 \(u_2\),可以采用 降阶方法(deflation)。
假设 \(A \in \mathbb{R}^{n \times n}\) 是对称矩阵(即特征向量互相正交)。令 \(A^{(1)} = A\),定义矩阵:
\[
A^{(2)} = A^{(1)} - \lambda_1 \frac{u_1 u_1^T}{u_1^T u_1}
\]
定理 4.1(降阶矩阵的性质)
对于上述定义的 \(A^{(2)}\),有:
\[
A^{(2)} u_1 = 0, \quad A^{(2)} u_i = \lambda_i u_i \quad (i = 2, 3, \ldots, n)
\]
即 \(A^{(2)}\) 的特征值为 \(0, \lambda_2, \lambda_3, \ldots, \lambda_n\),对应的特征向量不变。
降阶方法的局限
降阶方法在求解特征值的时候,精度不佳。且不能保证矩阵的稀疏性。一般仅用于求前几个特征值和特征向量。
5 反幂法
5.1 反幂法原理
反幂法用来求矩阵 \(A\) 的 按模最小特征值 和特征向量。
假设 \(A\) 没有零特征值,即 \(A\) 非奇异。若 \(\lambda_i\) 与 \(u_i\) 是 \(A\) 的特征值以及对应的特征向量,则:
\[
\det(\lambda I - A^{-1}) = \det(A^{-1}) \det(\lambda A - I) = \lambda^n \det(A^{-1}) \det(A - \lambda^{-1} I)
\]
比较可知,\(\lambda = 1/\lambda_i\) 为 \(A^{-1}\) 的特征值。即 \(A^{-1}\) 的特征值是 \(A\) 特征值的倒数,最小的特征值变为最大的特征值。
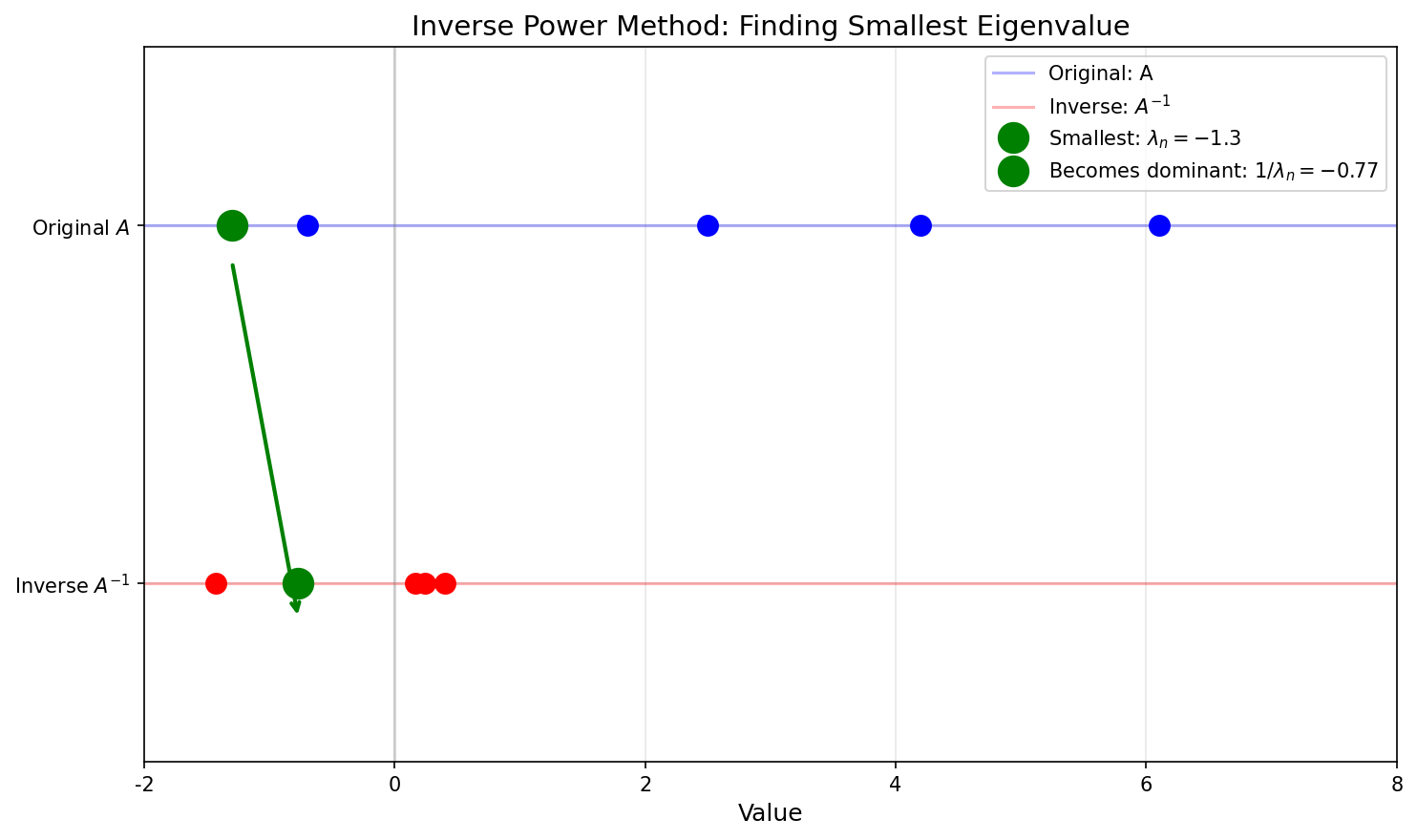
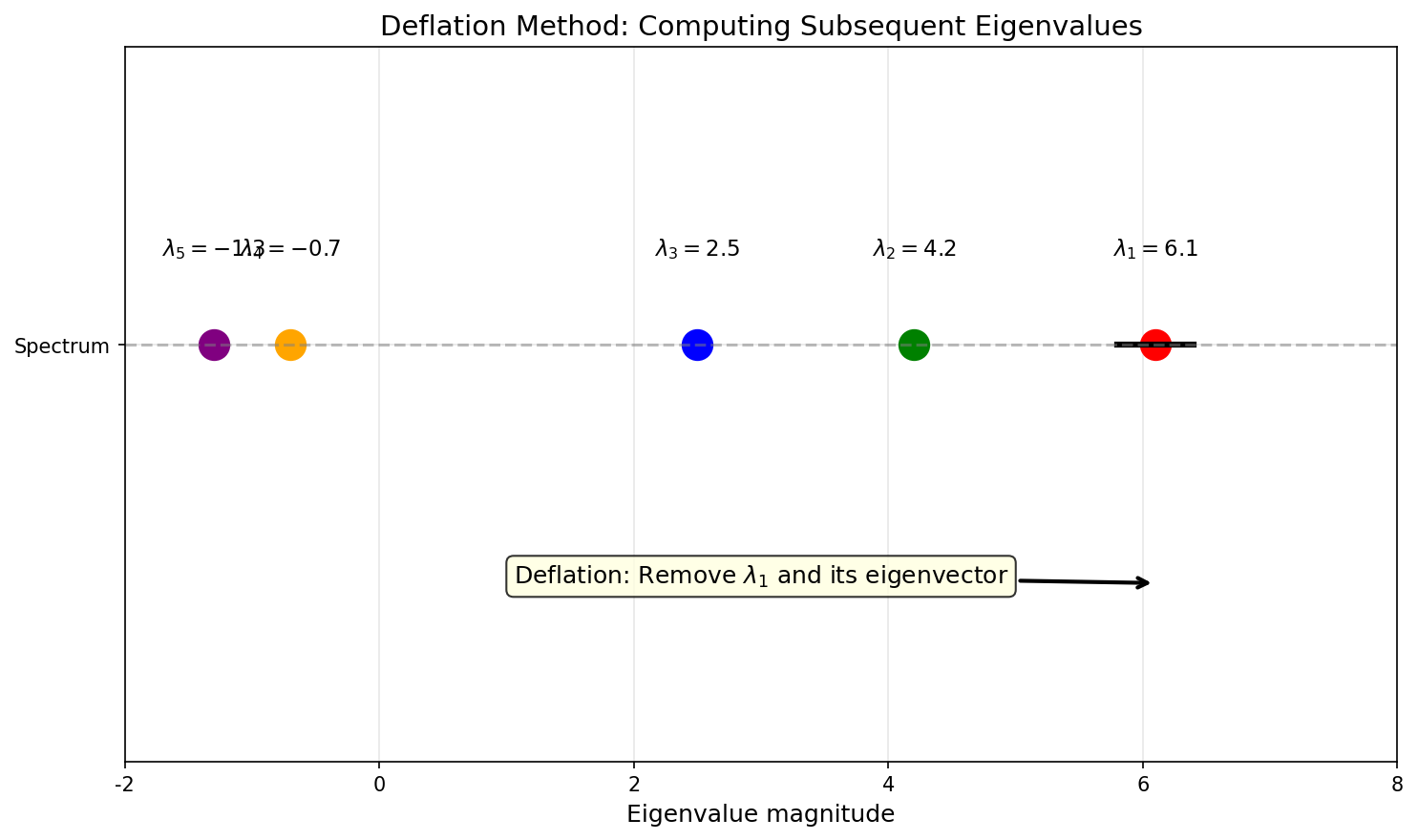
上图中,原矩阵 \(A\) 的最小特征值 \(\lambda_n = -1.3\),在 \(A^{-1}\) 中变为最大的特征值 \(-0.77\)。
5.2 实用算法
直接计算 \(A^{-1}\) 是不经济的,因为当 \(A\) 稀疏时,\(A^{-1}\) 不一定稀疏。因此,在幂法中,将:
\[
x^{(k)} = A^{-1} x^{(k-1)}
\]
改写为求解线性方程组:
\[
A x^{(k)} = x^{(k-1)}
\]
利用 LU 分解可以高效求解。
算法 5.1(反幂法)
\[
\begin{aligned}
& \textbf{算法: } \text{Inverse Power Method} \\
& \textbf{输入: } A \in \mathbb{R}^{n \times n}, \quad x^{(0)} \in \mathbb{R}^n, \quad N, \quad \varepsilon \\
& \textbf{输出: } \lambda_n \text{ (最小特征值)}, \quad u_n \text{ (对应特征向量)} \\
& 1. \quad \text{计算 } A \text{ 的 LU 分解: } A = LU \\
& 2. \quad k \leftarrow 0 \\
& 3. \quad \mu \leftarrow 10^{16} \quad \text{// 大数初始化} \\
& 4. \quad \textbf{while } k < N \textbf{ do} \\
& 5. \quad \quad i \leftarrow \arg\max_j |x_j| \\
& 6. \quad \quad \lambda \leftarrow x_i \\
& 7. \quad \quad y \leftarrow x / \lambda \\
& 8. \quad \quad \text{求解 } Lz = y \text{ (前向替换)} \\
& 9. \quad \quad \text{求解 } Ux = z \text{ (后向替换)} \\
& 10. \quad \quad \textbf{if } |1/\mu - 1/\lambda| < \varepsilon \textbf{ then} \\
& 11. \quad \quad \quad \textbf{return } 1/\lambda, y \\
& 12. \quad \quad \textbf{end if} \\
& 13. \quad \quad k \leftarrow k + 1 \\
& 14. \quad \quad \mu \leftarrow \lambda \\
& 15. \quad \textbf{end while} \\
& 16. \quad \lambda_n \leftarrow 1/\lambda \\
& 17. \quad \textbf{return } \lambda_n, y
\end{aligned}
\]
5.3 反幂法与位移结合
幂法中的加速方法也可以在反幂法中使用,即用 \(A - \lambda_0 I\) 代替 \(A\)。特别有用的应用是:快速求解已知近似特征值 \(\lambda^*\) 的精确值。
此时,用 \(A - \lambda^* I\) 代替 \(A\),再采取反幂法,求解 \(A - \lambda^* I\) 按模最小的特征值 \(\lambda - \lambda^*\)。由于 \(\lambda^*\) 是 \(A\) 的一个近似特征值,可以认为:
\[
0 < |\lambda - \lambda^*| \ll |\lambda_i - \lambda^*|, \quad \forall \lambda_i \neq \lambda
\]
因此,收敛会非常快。这是 计算已知近似特征值精确值 的有效方法。
6 Jacobi 算法
6.1 算法概述
Jacobi 算法是用来计算 实对称矩阵 的 所有特征值 以及对应的特征向量的一种变换法。
定理 6.1(实对称矩阵的对角化)
对于实对称矩阵 \(A\),存在正交矩阵 \(Q\),使得:
\[
Q^T A Q = D
\]
其中 \(D\) 是对角矩阵,且对角线元素 \(D_{ii}\) 即为特征值 \(\lambda_i\),而 \(Q\) 的第 \(i\) 列即为 \(\lambda_i\) 对应的特征向量。
也即:实对称矩阵存在一组相互正交的单位特征向量,作为它的标准正交基。它告诉我们,实对称矩阵描述的线性变换,本质上只是在某一组相互垂直的方向上进行了拉伸或压缩。
6.2 2x2 矩阵的 Jacobi 旋转
先考察对称矩阵 \(A \in \mathbb{R}^{2 \times 2}\) 的情形:
\[
A = \begin{bmatrix} a_{11} & a_{12} \\ a_{12} & a_{22} \end{bmatrix}, \quad a_{12} \neq 0
\]
假设正交矩阵 \(Q\) 表示为旋转矩阵:
\[
Q = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix}
\]
做正交变换 \(A^{(1)} = Q^T A Q\),比较矩阵分量,要使得 \(A^{(1)}\) 为对角阵,需要选择合适的 \(\theta\) 使得 \(a_{12}^{(1)} = 0\),即:
\[
\cot 2\theta = \frac{a_{11} - a_{22}}{2a_{12}}
\]
其中 \(\theta \in [-\pi/4, \pi/4]\)。
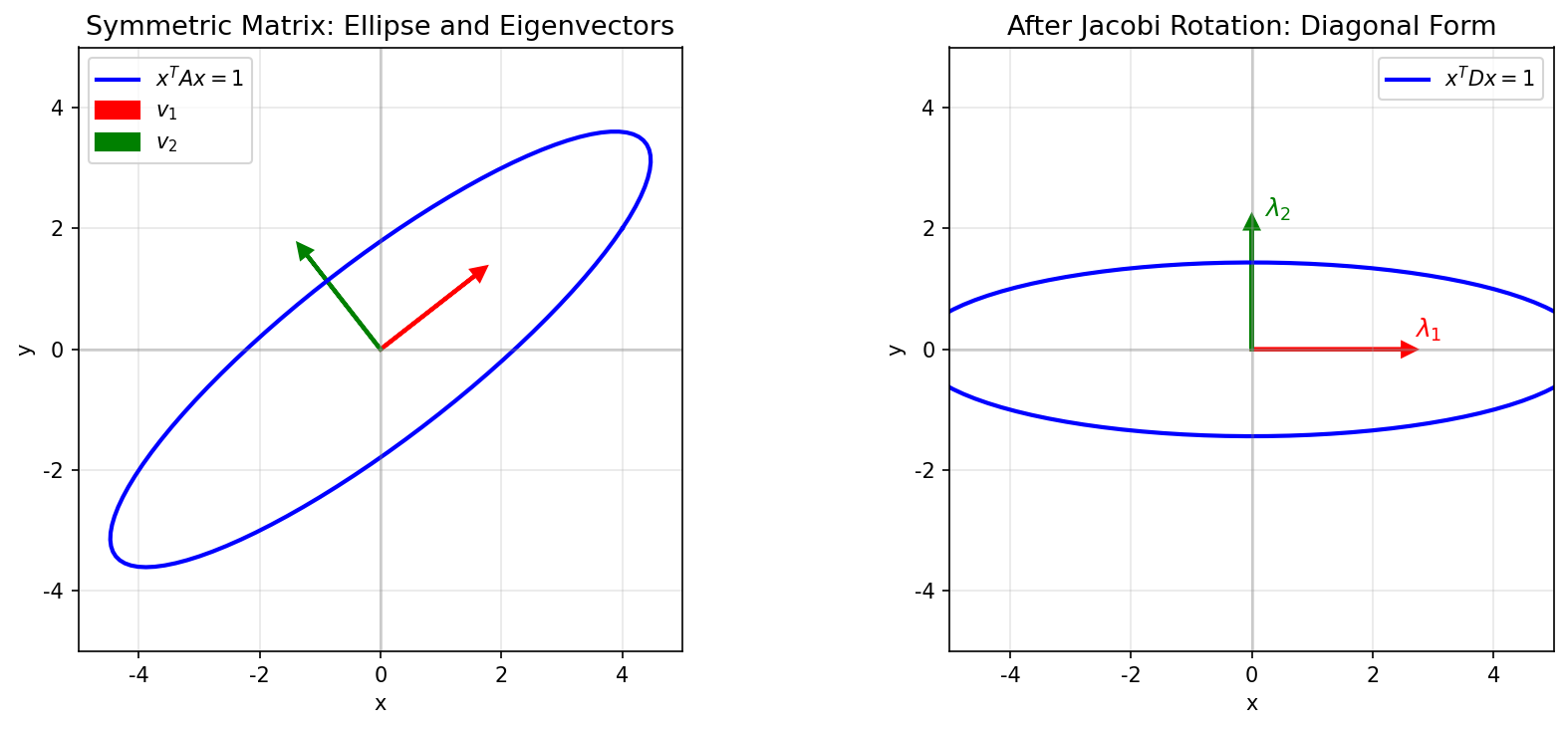
上图展示了 Jacobi 旋转的几何意义:通过正交变换将椭圆旋转到与坐标轴对齐的位置,此时矩阵变为对角形式。
6.3 n×n 矩阵的 Jacobi 方法
对于 \(n \times n\) 对称矩阵,假设存在非对角元 \(a_{ij} = a_{ji} \neq 0\)。构造正交变换矩阵 \(Q_{ij}\):
\[
Q_{ij} = \begin{bmatrix}
I_{i-1} & & & & \\
& \cos\theta & & -\sin\theta & \\
& & I_{j-i-1} & & \\
& \sin\theta & & \cos\theta & \\
& & & & I_{n-j}
\end{bmatrix} \begin{matrix} \\ \leftarrow \text{row } i \\ \\ \leftarrow \text{row } j \end{matrix}
\]
通过计算 \(A_1 = Q_{ij}^T A Q_{ij}\),并选择合适的 \(\theta\) 使得 \(a_{ij}^{(1)} = 0\)。这样的正交相似变换仅改变 \(A\) 的第 \(i, j\) 行与列的值。
定理 6.2(Jacobi 算法的收敛性)
每次正交变换选择绝对值最大的非对角线元素 \(a_{ij}\),构建正交变换矩阵 \(Q_{ij}\)。则有:
\[
S(A^{(k+1)}) \leq \left( 1 - \frac{2}{n(n-1)} \right) S(A^{(k)})
\]
当 \(k \to \infty\) 时,非对角线元素平方和趋于 \(0\),即 Jacobi 算法收敛。
证明
为了证明该定理,我们需要先引入一些基本定义与性质。
1. 基本定义与性质
- Frobenius 范数:对于矩阵 \(A \in \mathbb{R}^{n \times n}\),其 Frobenius 范数定义为:
$$
|A|F^2 = \sum^2
$$}^n \sum_{j=1}^n a_{ij
- 正交变换的不变性:Frobenius 范数在正交变换下保持不变。即对任意正交矩阵 \(Q\),有 \(\|Q^T A Q\|_F = \|A\|_F\)。
- 非对角元素平方和:记 \(S(A)\) 为矩阵 \(A\) 的所有非对角元素的平方和,则有:
$$
S(A) = |A|F^2 - \sum^2
$$}^n a_{ii
2. 迭代过程的推导
考虑在第 \(k\) 次迭代中,选择非对角元素 \(a_{ij}^{(k)}\)(不妨设 \(i < j\))进行旋转。变换矩阵为 \(Q_{ij}\),变换后的矩阵为 \(A^{(k+1)} = Q_{ij}^T A^{(k)} Q_{ij}\)。
由正交变换的不变性,我们有:
\[
\|A^{(k+1)}\|_F^2 = \|A^{(k)}\|_F^2
\]
该变换仅改变矩阵的第 \(i\) 行、第 \(j\) 行、第 \(i\) 列和第 \(j\) 列。特别地,对于对角元素,我们有如下关系(由 \(2 \times 2\) 子矩阵的正交相似变换性质):
\[
(a_{ii}^{(k+1)})^2 + (a_{jj}^{(k+1)})^2 + 2(a_{ij}^{(k+1)})^2 = (a_{ii}^{(k)})^2 + (a_{jj}^{(k)})^2 + 2(a_{ij}^{(k)})^2
\]
由于我们在 Jacobi 旋转中选择 \(\theta\) 使得 \(a_{ij}^{(k+1)} = 0\),上述等式简化为:
\[
(a_{ii}^{(k+1)})^2 + (a_{jj}^{(k+1)})^2 = (a_{ii}^{(k)})^2 + (a_{jj}^{(k)})^2 + 2(a_{ij}^{(k)})^2
\]
对于其他对角元素 \(m \neq i, j\),有 \(a_{mm}^{(k+1)} = a_{mm}^{(k)}\)。因此,所有对角元素的平方和满足:
\[
\sum_{m=1}^n (a_{mm}^{(k+1)})^2 = \sum_{m=1}^n (a_{mm}^{(k)})^2 + 2(a_{ij}^{(k)})^2
\]
代入 \(S(A)\) 的定义:
\[
\begin{aligned}
S(A^{(k+1)}) &= \|A^{(k+1)}\|_F^2 - \sum_{m=1}^n (a_{mm}^{(k+1)})^2 \\
&= \|A^{(k)}\|_F^2 - \left( \sum_{m=1}^n (a_{mm}^{(k)})^2 + 2(a_{ij}^{(k)})^2 \right) \\
&= S(A^{(k)}) - 2(a_{ij}^{(k)})^2
\end{aligned}
\]
这表明,每一步 Jacobi 旋转都会使非对角元素的平方和减少 \(2(a_{ij}^{(k)})^2\)。
3. 最大元素的选取策略
在经典 Jacobi 算法中,我们选择绝对值最大的非对角元素 \(a_{ij}^{(k)}\)。由于对称矩阵共有 \(n(n-1)\) 个非对角元素(计入 \(a_{ij}\) 与 \(a_{ji}\)),即有 \(n(n-1)/2\) 对非对角元素。由平均值原理:
\[
(a_{ij}^{(k)})^2 = \max_{p \neq q} (a_{pq}^{(k)})^2 \geq \frac{1}{n(n-1)} S(A^{(k)})
\]
将其代入上一步的结论中:
\[
S(A^{(k+1)}) = S(A^{(k)}) - 2(a_{ij}^{(k)})^2 \leq S(A^{(k)}) - \frac{2}{n(n-1)} S(A^{(k)})
\]
整理得:
\[
S(A^{(k+1)}) \leq \left( 1 - \frac{2}{n(n-1)} \right) S(A^{(k)})
\]
4. 结论与代数解释
由于对任意 \(n \geq 2\),有 \(0 \leq 1 - \frac{2}{n(n-1)} < 1\),由夹逼定理可知:
\[
\lim_{k \to \infty} S(A^{(k)}) = 0
\]
这意味着随着迭代次数的增加,非对角元素趋于 \(0\),矩阵 \(A^{(k)}\) 趋于对角矩阵。 \(\square\)
数值算例验证
考虑对称矩阵 \(A = \begin{bmatrix} 4 & 2 \\ 2 & 1 \end{bmatrix}\),其非对角元素平方和 \(S(A) = 2^2 + 2^2 = 8\)。
第 1 步:计算旋转角度
选择唯一的非对角对 \((1, 2)\),计算 \(\theta\):
\[
\tau = \frac{a_{22} - a_{11}}{2a_{12}} = \frac{1 - 4}{2 \times 2} = -0.75
\]
计算 \(t = \tan\theta = \frac{\operatorname{sgn}(\tau)}{|\tau| + \sqrt{1 + \tau^2}} = \frac{-1}{0.75 + 1.25} = -0.5\)。
由此得 \(\cos\theta = \frac{1}{\sqrt{1 + t^2}} = \frac{2}{\sqrt{5}}\),\(\sin\theta = t \cos\theta = -\frac{1}{\sqrt{5}}\)。
第 2 步:更新矩阵元素
\[
\begin{aligned}
a_{11}^{(1)} &= a_{11} - t a_{12} = 4 - (-0.5) \times 2 = 5 \\
a_{22}^{(1)} &= a_{22} + t a_{12} = 1 + (-0.5) \times 2 = 0 \\
a_{12}^{(1)} &= 0
\end{aligned}
\]
得到对角阵 \(A^{(1)} = \begin{bmatrix} 5 & 0 \\ 0 & 0 \end{bmatrix}\)。
第 3 步:验证收敛性定理
对于 \(n=2\),\(1 - \frac{2}{n(n-1)} = 1 - \frac{2}{2 \times 1} = 0\)。
定理预测 \(S(A^{(1)}) \leq 0 \cdot S(A^{(0)}) = 0\),这与我们的计算结果 \(S(A^{(1)}) = 0\) 完全吻合。这意味着对于 \(2 \times 2\) 矩阵,Jacobi 算法仅需一步即可收敛。
6.4 算法流程
算法 6.1(Jacobi 算法)
\[
\begin{aligned}
& \textbf{算法: } \text{Jacobi Method} \\
& \textbf{输入: } A \in \mathbb{R}^{n \times n} \text{ (对称矩阵)}, \quad \varepsilon \\
& \textbf{输出: } \lambda_1, \ldots, \lambda_n \text{ (特征值)}, \quad Q \text{ (特征向量矩阵)} \\
& 1. \quad k \leftarrow 0 \\
& 2. \quad Q \leftarrow I \quad \text{// 初始化正交矩阵} \\
& 3. \quad \textbf{while } \sum_{i \neq j} a_{ij}^2 > \varepsilon \textbf{ do} \\
& 4. \quad \quad \text{选择 } (i, j) \text{ 使得 } |a_{ij}| = \max_{p \neq q} |a_{pq}| \\
& 5. \quad \quad \tau \leftarrow \frac{a_{jj} - a_{ii}}{2a_{ij}} \\
& 6. \quad \quad t \leftarrow \operatorname{sign}(\tau) / (|\tau| + \sqrt{1 + \tau^2}) \quad \text{// } \tan\theta \\
& 7. \quad \quad c \leftarrow 1 / \sqrt{1 + t^2} \quad \text{// } \cos\theta \\
& 8. \quad \quad s \leftarrow c \cdot t \quad \text{// } \sin\theta \\
& 9. \quad \quad \text{// 更新矩阵元素} \\
& 10. \quad \quad a_{ii}' \leftarrow a_{ii} - t \cdot a_{ij} \\
& 11. \quad \quad a_{jj}' \leftarrow a_{jj} + t \cdot a_{ij} \\
& 12. \quad \quad a_{ij}' \leftarrow 0, \quad a_{ji}' \leftarrow 0 \\
& 13. \quad \quad \text{更新 } A \text{ 的第 } i, j \text{ 行和列其他元素} \\
& 14. \quad \quad \text{更新 } Q \text{ 的第 } i, j \text{ 列} \\
& 15. \quad \quad k \leftarrow k + 1 \\
& 16. \quad \textbf{end while} \\
& 17. \quad \lambda_i \leftarrow a_{ii} \text{ for } i = 1, \ldots, n \\
& 18. \quad \textbf{return } \lambda, Q
\end{aligned}
\]
7 总结
7.1 方法对比
| 方法 |
适用范围 |
计算内容 |
收敛速度 |
特点 |
| 幂法 |
一般矩阵 |
主特征值及特征向量 |
线性收敛 |
简单易实现,收敛速度依赖 $ |
| 带位移幂法 |
一般矩阵 |
主特征值及特征向量 |
加速收敛 |
通过原点位移改善收敛比 |
| 降阶法 |
对称矩阵 |
前几个特征值 |
逐步降低 |
精度逐渐下降,适合只求少量特征值 |
| 反幂法 |
一般矩阵 |
最小特征值及特征向量 |
线性收敛 |
每次迭代需求解线性方程组 |
| 位移反幂法 |
一般矩阵 |
已知近似值的精确特征值 |
二次收敛 |
快速精化近似特征值 |
| Jacobi 法 |
对称矩阵 |
所有特征值及特征向量 |
线性收敛 |
精度高,适合小规模稠密对称矩阵 |
7.2 核心公式
幂法迭代:
\[
y^{(k)} = \frac{x^{(k)}}{\|x^{(k)}\|_\infty}, \quad x^{(k+1)} = A y^{(k)}, \quad \lambda_1^{(k)} = \|x^{(k)}\|_\infty
\]
原点位移:
\[
A' = A - \lambda_0 I, \quad \lambda_i' = \lambda_i - \lambda_0
\]
降阶矩阵:
\[
A^{(2)} = A^{(1)} - \lambda_1 \frac{u_1 u_1^T}{u_1^T u_1}
\]
反幂法:
\[
A x^{(k)} = x^{(k-1)}, \quad \lambda_n = \frac{1}{\|x^{(k)}\|_\infty}
\]
Jacobi 旋转:
\[
\cot 2\theta = \frac{a_{ii} - a_{jj}}{2a_{ij}}, \quad A^{(1)} = Q_{ij}^T A Q_{ij}
\]